
Einleitung
Im folgenden beschreibe ich die von mir entwickelten Platinen zum Bau eines Doppel-Fahrpults und eines Stellpults für XpressNet.
Seit vielen Jahren steuere ich die Lokomotiven auf meinen Ausstellungsplatten mit der Roco Multimaus. Der Rest wird mit Rocrail gesteuert. Die Feinfühligkeit der Steuerung ist bei der Multimaus einfach unübertroffen. Da kann keine Steuerung am PC oder am Smartphone mithalten. Einziger Nachteil: möchte man mehrere Loks gleichzeitig fahren lassen, braucht man entweder mehrere Multimäuse oder gute Nerven, um zwischen den Loks hin- und herzuschalten.
Da kam die Ankündigung von Digikeijs wie gerufen, ein Fahrpult mit zwei Reglern für XpressNet herauszubringen. Leider blieb es bei einer Ankündigung und auch auf mehrfache Nachfrage wird das Fahrpult wohl nicht in Serie gehen. Mittlerweile ist die Rubrik “In Entwicklung” auch von der Webseite verschwunden. Schade, ich denke, dass der Bedarf vorhanden wäre.
Aus diesem Grund habe ich selbst zu Layoutprogramm und Entwicklungsumgebung gegriffen und für die Realisierung von Stellpult und Fahrpult drei Platinen und passende Software entwickelt.
Allzweckwaffe Arduino
 Um die Entwicklung zu vereinfachen, basiert meine Idee auf dem Arduino Mega-Board.
Um die Entwicklung zu vereinfachen, basiert meine Idee auf dem Arduino Mega-Board.
 Auf dieses Board wird eine Platine aufgesteckt (Shield), die Steckverbinder für Tasten, LCD-Display, LED-Ansteuerung, XpressNet usw. enthält. Diese Platine wird sowohl beim Stellpult, als auch beim Fahrpult eingesetzt und wird dann entsprechend bestückt.
Auf dieses Board wird eine Platine aufgesteckt (Shield), die Steckverbinder für Tasten, LCD-Display, LED-Ansteuerung, XpressNet usw. enthält. Diese Platine wird sowohl beim Stellpult, als auch beim Fahrpult eingesetzt und wird dann entsprechend bestückt.
Um die Konfiguration (Weichenadressen, Lokadressen usw.) einfach parametrieren zu können, habe ich eine Micro-SD-Karte mit einer Konfigurationsdatei vorgesehen.
Fahrpult

Fertig montiert sieht das Ganze dann so aus.
Das Fahrpult verfügt über zwei Regler, mit denen zwei Loks gleichzeitig gesteuert werden können. Zusätzlich stehen 6 beleuchtete Funktionstasten und eine Lichttaste zur Verfügung.
Die Steuerung der Lok unterscheidet sich etwas von der Multimaus: hier kommt ein Endlos-Drehencoder zum Einsatz. Die Fahrrichtungsumschaltung erfolgt per Taste. Außerdem gibt es 5 Geschwindigkeitstasten (Stop, 20%, 50%, 80% und 100%). Die Geschwindigkeit kann entweder per Drehknopf oder über die Geschwindigkeitstasten eingestellt werden. Es ist jederzeit möglich, von der per Geschwindigkeitstaste eingestellten Geschwindigkeit mit dem Drehregler weiterzuregeln. Das Anfahren und Bremsen übernimmt der Lokdecoder mit den dort eingestellten Anfahr- und Bremsverzögerungen.
Deteilbeschreibung des Fahrpults
Stellpult
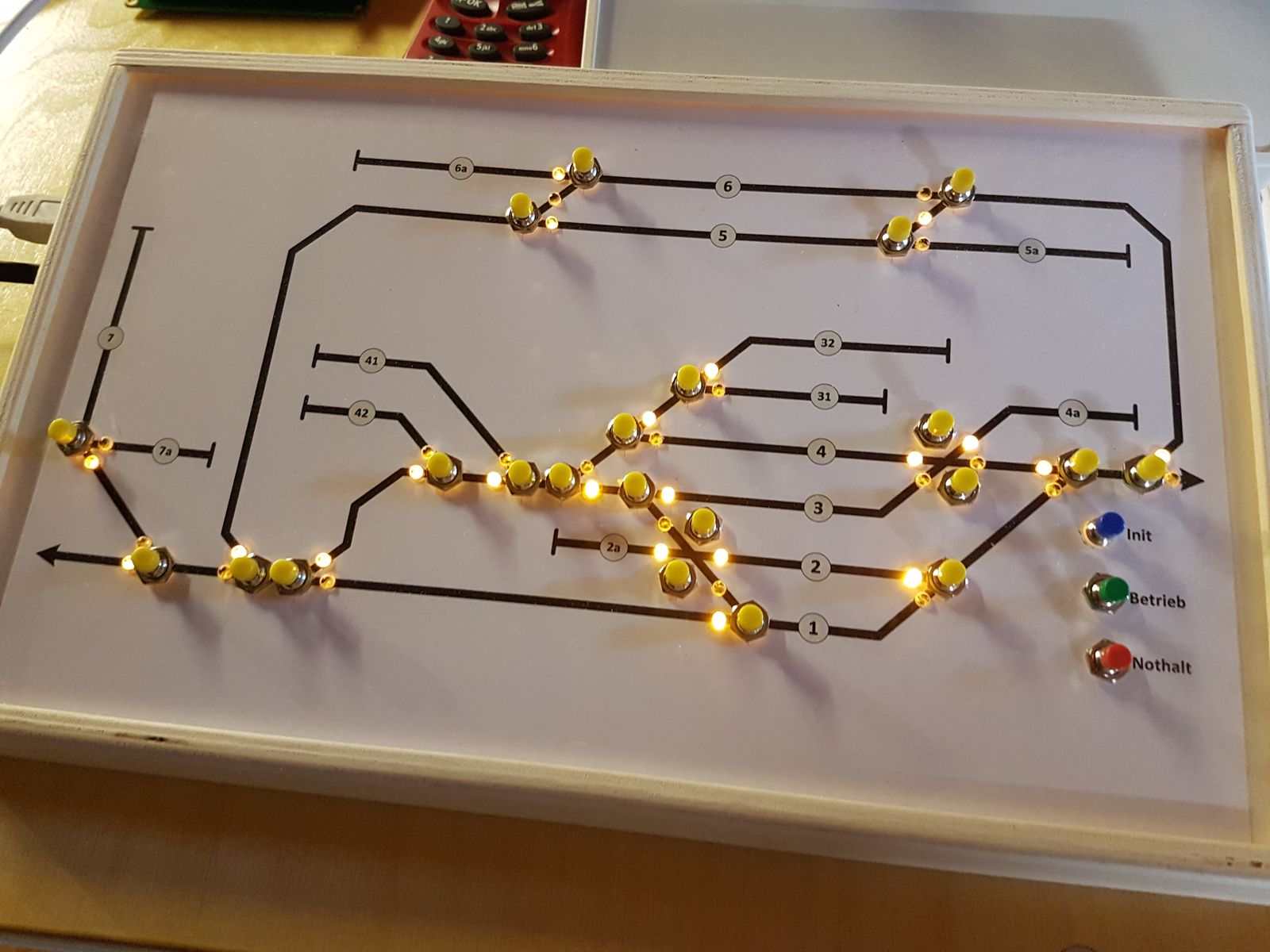 Für das Stellpult kommt ebenfalls das o.g. Shield zum Einsatz. Hieran werden die Tasten für die Weichen angeschlossen. Es kann entweder eine oder zwei Tasten pro Weiche verwendet werden. Dies wird dann über die Konfigurationsdatei parametriert. Durch die 8×8-Matrix können maximal 64 Tasten angeschlossen werden.
Für das Stellpult kommt ebenfalls das o.g. Shield zum Einsatz. Hieran werden die Tasten für die Weichen angeschlossen. Es kann entweder eine oder zwei Tasten pro Weiche verwendet werden. Dies wird dann über die Konfigurationsdatei parametriert. Durch die 8×8-Matrix können maximal 64 Tasten angeschlossen werden.
Für die Ansteuerung von LEDs zur Anzeige der Weichenlage können maximal 2 LED-Ansteuerungsplatinen für jeweils 8×8 LEDs, insgesamt also 128 LEDs angeschlossen werden.
Detailbeschreibung des Stellpults
Entwicklungsstand
Derzeit sind die Basisfunktionen in Verbindung mit einer Roco Zentrale 10764 und Multimaus funktional. Ein Test an einer Digikeijs DR5000 konnte ebenfalls erfolgreich abgeschlossen werden. Seit einiger Zeit sind das Fahrpult und das Stellpult an einer DR5000 im Dauerbetrieb im Einsatz.








Sehr geehrter Herr Schulze,
wo bekomme ich für ihren tollen universellen Stellpult
die Sonderplatine zum Atmega?
Mit freundlichen Grüßen
Hanns Briegel